|
I am currently a Postdoctoral Fellow in Applied Control and Computing Laboratory of Department of Mechanical and Automation Engineering, The Chinese University of Hong Kong (CUHK). I received my Ph.D. degree in Mechanical and Automation Engineering from CUHK in 2024, supervised by Prof. Jie Huang. Before that, I received my B.Eng. degree in Flight Vehicle Design and Engineering, and my M.Eng. degree in Aerospace Science and Technology from Beihang University (aka. Beijing University of Aeronautics and Astronautics, BUAA) in 2017 and 2020 respectively. I have been awarded the National Scholarship at BUAA and the Vice-Chancellor's PhD Scholarship at CUHK. Email / CV / Google Scholar / Github |

|
|
My research interests include networked multi-agent systems, nonlinear control, output regulation, adaptive control, robot manipulator control, spacecraft guidance, navigation, and control. |
|
|
|
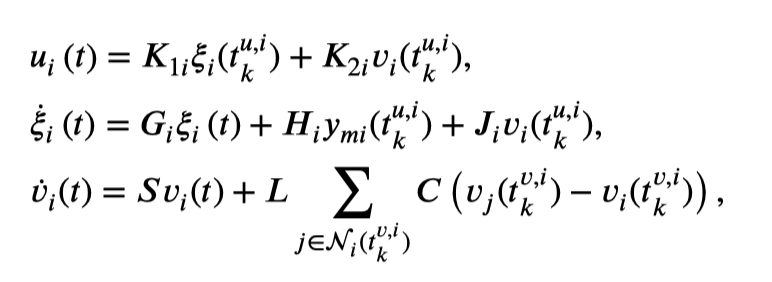
Rui Zhang, Jie Huang, IEEE Transactions on Cybernetics, 2024 In this paper, a fully event-triggered adaptive distributed control law is developed for solving the practical leaderfollowing consensus problem (LFCP) of a group of Euler-Lagrange (EL) systems with uncertain parameters. An event-triggered output-based distributed observer (OBDO) is established first to estimate the state variable of the leader system over jointly connected switching networks (JCSNs). Then the event-triggered adaptive control law is designed to exclude the Zeno phenomenon and to make the steady-state consensus error smaller than any specified value by adjusting some design parameters. Compared with the similar results, the proposed event-triggered control law can be directly applied to a digital platform. A group of two-link manipulators is utilized as a numerical example to illustrate the overall design. |
|
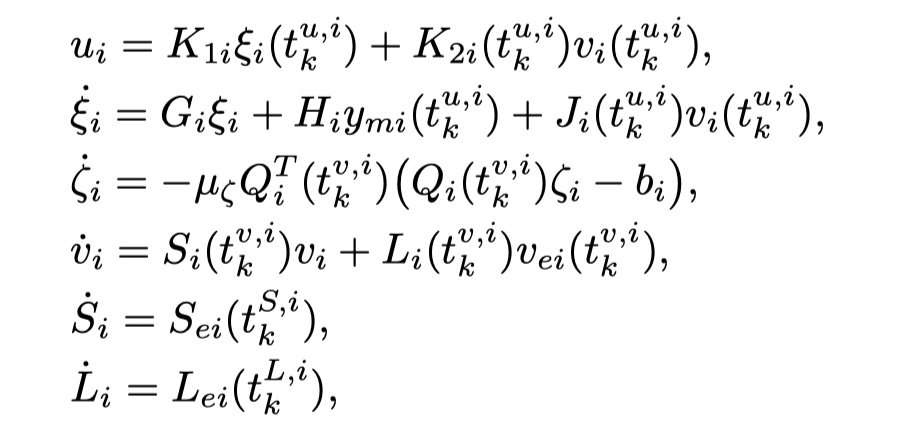
Rui Zhang, Jie Huang, Neurocomputing, 2024 This paper proposes the event-triggered output-based distributed observer (ETOBDO) for a leader system with linear dynamics over switching communication networks satisfying the jointly connected condition. Then ETOBDO is applied to solve the cooperative output regulation problem (CORP) of linear heterogeneous multiagent systems (MASs) over jointly connected switching networks (JCSNs). Comparing with the similar results which only implement the distributed observer by the event-triggering mechanism, we implement both the distributed observer and the control law of each follower by the event-triggering mechanism. Thus, our overall output feedback control law can be directly implemented in a digital platform. Moreover, we give a rigorous proof for the prevention of Zeno phenomenon. |
|
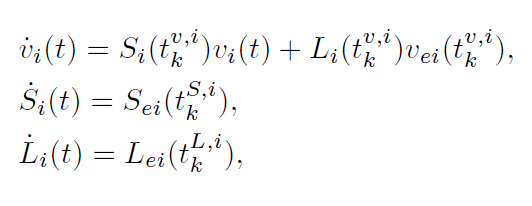
Rui Zhang, Jie Huang, 2024 International Conference on Control, Automation and Diagnosis (ICCAD), 2024 In this paper, we implement the adaptive distributed observer (ADO) based control law for solving the linear cooperative output regulation problem (CORP) by a fully event-triggered mechanism. In comparison with the existing approaches, the overall control law in this paper offers a few features. First, it is not only fully distributed but also directly implementable in a digital platform. Second, it applies to jointly connected switching networks (JCSNs), which can be disconnected at every time instant. Third, the control law only relies on the output instead of the state of the leader. Further, our approach strictly excludes the Zeno phenomenon. Our design is illustrated by a numerical example. |
|
Rui Zhang, Jie Huang, Nonlinear Analysis: Hybrid Systems, 2023 This paper proposes an event-triggered implementation of the output-based adaptive distributed observer for a linear leader system over jointly connected communication networks. The proposed triggering mechanism not only retains the exponential convergence property of the analog adaptive distributed observer but also prevents the Zeno phenomenon from happening. |
|
|
|
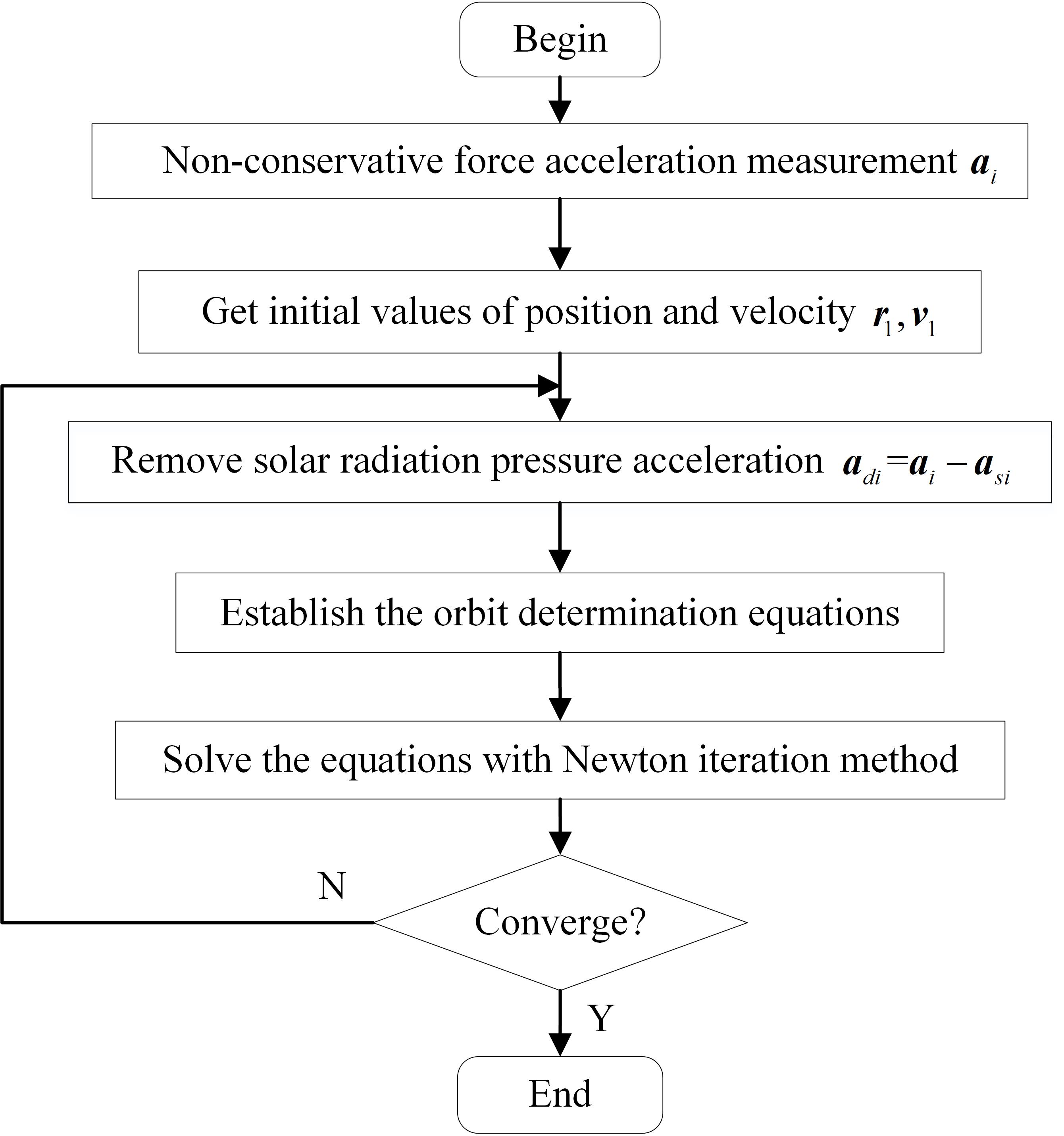
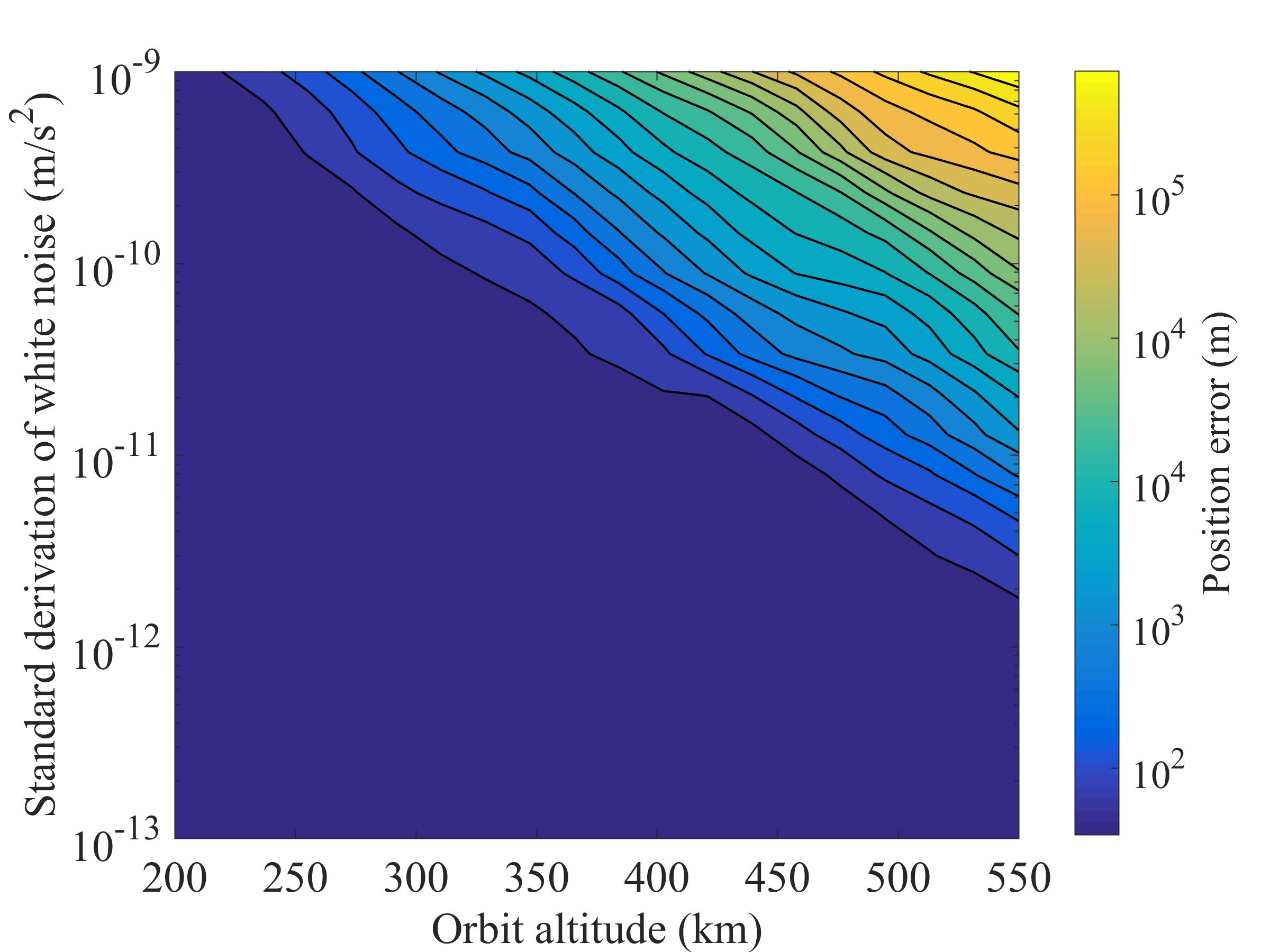
Rui Zhang, Chao Han, Xiucong Sun, Zheng Qi Journal of Guidance, Control, and Dynamics, 2019 This Note investigates the feasibility of using a high-precision spaceborne accelerometer for orbit determination of LEO satellites in low-altitude regime where the atmospheric drag is prominent. |

|
Xinwei Wang, Chao Han, Rui Zhang, Yi Gu IEEE Access, 2019 Multiple AEOSs scheduling model for oversubscribed targets with multiple observations is initially developed, and the potential observation missions attained by available time windows discretization are regarded as nodes in the complex networks. |
|
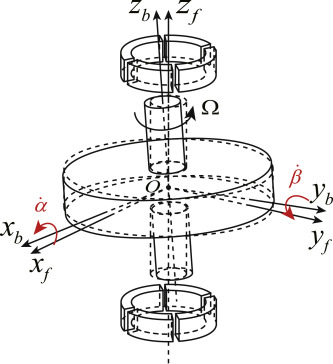
Rui Zhang, Yuanjin Yu, Chao Han, Zhaohua Yang Acta Astronautica, 2018 The Three Dimensional Magnetically Suspended Wheel (3-DMSW) is applied in attitude control. The saturation of rotor shaft deflection angle and rotor's variable rotational speed isconsidered. A novel anti-saturation steering law for 3-DMSW cluster is proposed. A new weight adjustment method for the steering law is specially designedand demonstrated theoretically. |
|
Rui Zhang, Fei Xu, Chao Han, Xiucong Sun AAS/AIAA Astrodynamics Specialist Conference, 2018 An autonomous low-Earth orbit determination method based on measurements of atmospheric drag is proposed, with use of a high-precision tri-axis accelerometer as well as a star sensor. |

|
Rui Zhang, Ran Zhang, Chao Han 4th IAA/AAS Conference on Dynamics, Control and Space Systems, 2018 The influence of the initial orbit states and the J2 perturbation on the fuel consumption is analyzed through multiple numerical simulations. The results show that the optimization method is effective and the influence on the fuel consumption provide some valuable engineering guidance. |
|
I am interested in photography, poetry and hiking. I am a talented violinist, too. Here are some of my photos. |
 |
 |
| Bald cypress in CUHK | Victoria's Harbour |
 |
 |
| Nightfall in BUAA | The Forbidden City |
 |
 |
| Saint Sophia Cathedral of Harbin | Changbai Mountain |
|
Based on this website. |